
انتخاب موتور برای کمپرسورهای شعاعی

انواع موتور و نحوه انتخاب آن
موتور الکتریکی
موتور تجهیزی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند و بر اساس نوع جریان به دو دستهی زیر تقسیم میشوند:

دو نوع رایج موتور الکتریکی AC، موتورهای همزمان سنکرون (Synchronous) و موتورهای القایی آسنکرون (Asynchronous-Induction) هستند که هر دو نوع از اجزای ثابت (استاتور) و گردان (روتور) تشکیل شدهاند. استاتور بخش ثابت موتور است که دارای سیمپیچهایی است که به منبع تغذیه AC متصل میشوند. روتور بخش متحرک موتور است که به دلیل ساختار آن، به "قفس سنجابی" معروف است. روتور از میلههایی از جنس مواد رسانا (مانند آلومینیوم یا مس) تشکیل شده است. زمانی که استاتور به منبع تغذیه AC متصل میشود، یک میدان مغناطیسی چرخان ایجاد میکند. این میدان مغناطیسی جریانهایی را در روتور القا میکند و در نتیجه میدان مغناطیسی در روتور ایجاد میشود که باعث چرخش روتور میشود.

در موتور آسنکرون، سرعت واقعی موتور با سرعت سنکرون موتور برابر نیست و از آن کمتر است. جریان سه فاز در استاتور یک شار مغناطیسی با اندازه ثابت تولید میکند که با سرعت سنکرون (ns) میچرخد.
که Poles تعداد قطبهای استاتور و fs فرکانس استاتور است. پس از ایجاد شار مغناطیسی، روتور در جهت میدان مغناطیسی میچرخد. سرعت روتور (nm)از سرعت سنکرون میدان مغناطیسی القاشده توسط استاتورns کمتر است. بر همین مبنا پارامتر لغزش s به صورت زیر تعریف میشود:
فرکانس روتور نیز به صورت زیر قابل محاسبه است:
شماتیک این موتور در شکل زیر نشان داده شده است.

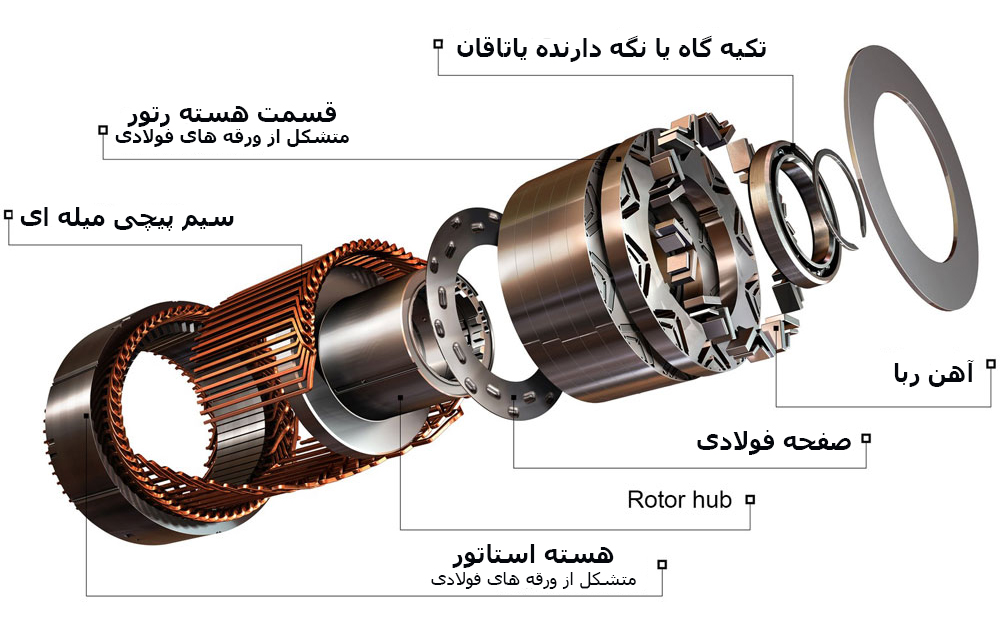
در موتور همزمان سنکرون، روتور معمولاً با همان سرعت میدان گردان در محفظه می چرخد. اجزای این موتور در شکل زیر نشان داده شده است.
انواع موتور الکتریکی جریان متناوب (AC)
· موتورهای سنکرون با آهنربای دائم
· موتورهای سنکرون بدون جاروبک
· موتورهای القایی روتور سیمپیچی شده
· موتورهای القایی قفس سنجابی
موتور القایی قفس سنجابی سهفاز رایجترین نوع موتور القایی AC است.
استانداردهای موتور
استانداردهای مورد استفاده در تجهیزات الکتریکی و موتورها شامل موارد زیر است:
· (NEMA): عمدتاً شامل استانداردهای ارائه شده در آمریکای شمالی است.
· (IEC): یک سازمان جهانی که استانداردهای بینالمللی برای تجهیزات الکتریکی والکترونیکی توسعه داده است.
پارامترهای عملکردی موتور
در بحث انتخاب موتور مناسب برای کمپرسورهای شعاعی، پارامترهای عملکردی زیر باید محاسبه شده و تعیین گردند:
گشتاور (Torque)
گشتاوری که از تبدیل توان الکتریکی به توان مکانیکی ایجاد میشود را گشتاور القایی میگویند. موتورهای الکتریکی بر اساس بار(Load) به انواع زیر تقسیمبندی میشوند:
• بار گشتاور ثابت: گشتاور مورد نیاز در سرعتهای مختلف نسبتاً ثابت باقی میماند.
• بار گشتاور متغیر: گشتاور مورد نیاز با سرعت تغییر میکند و معمولاً با افزایش سرعت افزایش مییابد.
• بار توان ثابت: توان مورد نیاز در سرعتهای مختلف ثابت باقی میماند.
• بار چرخهای: بار به طور گسترده تغییر میکند و معمولاً شامل قلهها و قعرهایی است.
نوع بار در کمپرسورهای شعاعی از نوع بار با گشتاور متغیر است. در این حالت گشتاور با مجذور سرعت و توان مورد نیاز با مکعب سرعت متناسب میباشد، به عبارتی با افزایش سرعت کمپرسور، گشتاور مورد نیاز موتور به طور قابل توجهی افزایش مییابد. اگر نموداری از گشتاور و سرعت بر اساس تغییرات لغزش رسم شود، نموداری مشابه شکل زیر به دست خواهد آمد.

· گشتاور روتور قفل شده (Locked rotor torque): گشتاوری است که موتور در حالت ایستایی (بدون حرکت) تولید میکند. این گشتاور گاهی به عنوان گشتاور شروع نیز شناخته میشود.
· گشتاور کششی (Pull-Up Torque): حداقل گشتاوری است که موتور هنگام شتابگیری از حالت ایستا تا سرعتی که در آن گشتاور شکست رخ میدهد، تولید میکند.
· گشتاور شکست (Breakdown Torque): حداکثر گشتاوری است که موتور قادر به تولید آن است.
· گشتاور بار کامل (Full Load Torque): گشتاور پایدار تولیدشده در حین عملیات است. این گشتاور برای تولید توان نامی موتور در سرعت بیشینه ضروری است.
برای انتخاب موتور مناسب لازم است که ارتباط بین منحنی گشتاور-سرعت کمپرسور و منحنی گشتاور-سرعت موتور بررسی شده و نواحی عملکرد پایدار و عملکرد ناپایدار آن تعیین شوند.
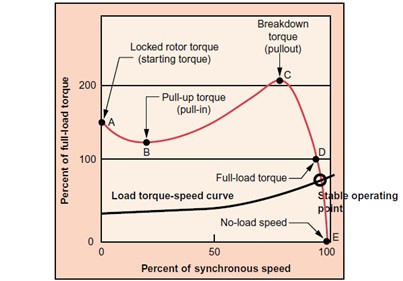
بر اساس شکل بالا، چون گشتاور موتور تا نقطه کاری بیشتر از گشتاور بار (Load) است، موتور قادر به شتابدهی بار خواهد بود. در صورتی که گشتاور بار در نقطه کاری افزایش یابد، موتور کند میشود؛ همچنین اگر سرعت موتور کاهش یابد، گشتاور موتور افزایش یافته و این روند تا زمان برابری با گشتاور بار ادامه مییابد. در این حالت عملکرد موتور پایدار است و ناحیه پایدار در سمت راست گشتاور شکست از نقطه C تا E قرار دارد.
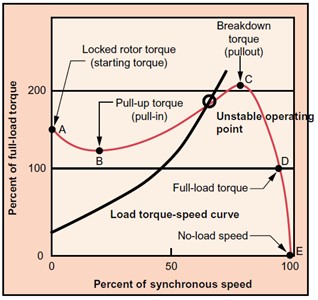
بر اساس شکل بالا، گشتاور موتور تا نقطه کاری بیشتر از گشتاور بار است و موتور قادر به شتابدهی بار است. اگر گشتاور بار در نقطه کاری افزایش یابد، موتور کند میشود. با کاهش سرعت، گشتاور موتور کاهش یافته و موتور بیشتر کند میشود و در نهایت، موتور متوقف خواهد شد. در این حالت عملکرد موتور ناپایدار است.
سرعت چرخش شفت (Main Driver Speed)
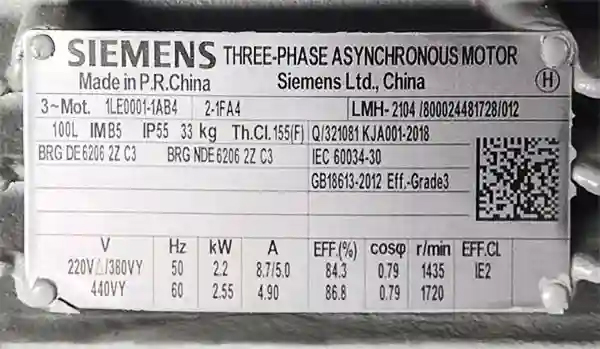
سرعت دورانی چرخش شفت موتور (RPM) از جمله پارامترهای مهم در انتخاب موتور است که از رابطهی زیر محاسبه میشود.

ولتاژ موتور (Main Driver Voltage)
اختلاف پتانسیل الکتریکی است که با واحد ولت اندازهگیری میشود. یک موتور برای عملکرد بهینه به ولتاژ مشخصی نیاز دارد، اگر ولتاژ خیلی پایین باشد، ممکن است موتور گشتاور کافی تولید نکرده و دچار گرمای بیش از حد شود. اگر ولتاژ خیلی بالا باشد، ممکن است جریان زیادی کشیده شود که میتواند به آسیب احتمالی منجر شود.
فرکانس (Frequency)
تعداد سیکلهای جریان متناوب در هر ثانیه که با واحد هرتز (Hz) اندازهگیری شده و به طور مستقیم بر سرعت موتور (RPM) تأثیر میگذارد. در موتورهای سنکرون، سرعت متناسب با فرکانس است و با افزایش فرکانس، سرعت موتور افزایش مییابد. موتورها معمولاً برای فرکانسهای مشخصی طراحی میشوند، معمولاً 50 هرتز یا 60 هرتز. عملکرد موتور خارج از محدوده فرکانس طراحیشده میتواند مشکلاتی مانند گرمای بیش از حد یا کاهش کارایی ایجاد کند.
توان نامی (Power Rating)
توان نامی که به عنوان توان مکانیکی نیز شناخته میشود، مقدار کار مکانیکی انجامشده در واحد زمان است که معمولاً بر اساس کیلووات (kW) اندازهگیری میشود. توان مکانیکی یک موتور را میتوان با استفاده از فرمول زیر محاسبه کرد:

که در آن توان مکانیکی (P) بر حسب کیلووات (kW)، گشتاور (T) بر حسب نیوتنمتر (Nm) است، سرعت زاویهای (ω) بر حسب دور بر دقیقه (RPM) است.
الزامات انتخاب موتور
در بحث انتخاب موتور مناسب علاوه پارامترهای عملکردی موتور، نیاز به درنظرگیری شرایط محیطی و الزامات ایمنی نیز است که در زیر به آنها پرداخته شده است:
طبقهبندی مناطق (Area Classification)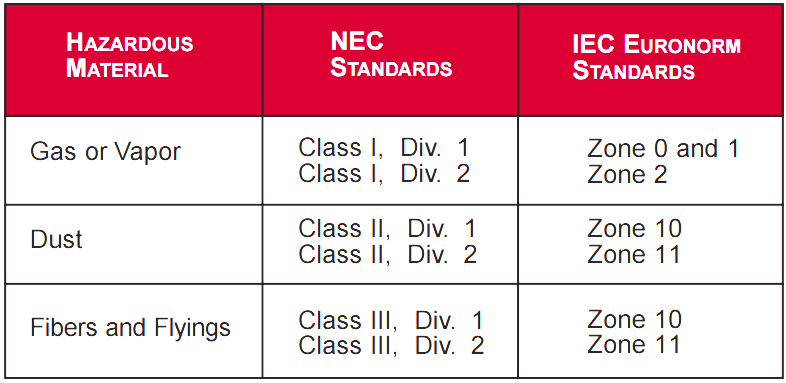
سیستم طبقهبندی مناطق بر اساس استاندارد، که هر منطقه با توجه به شرایط محیط و سیال موجود در محیط، به کلاس و دستهی مشخصی تقسیمبندی میشود.
کد حفاظت (Ingress Protection - IP)
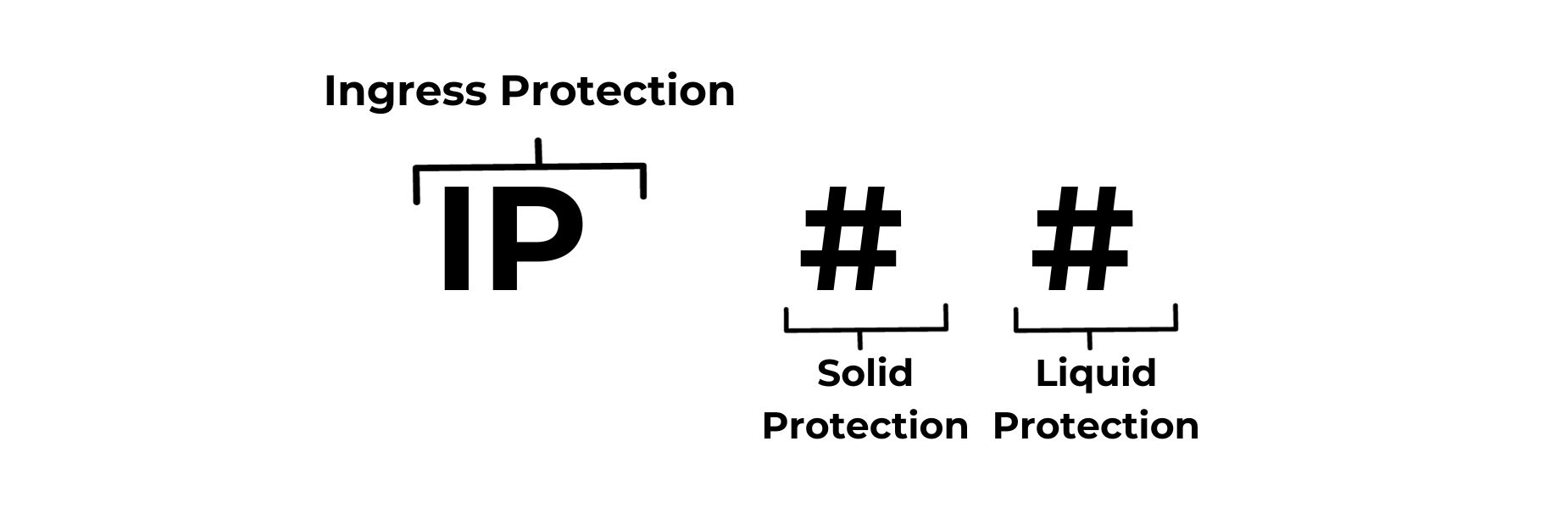 شامل یک سیستم طبقهبندی استاندارد است که سطح حفاظت یک محفظه را در برابر نفوذ اجسام جامد (مانند گردوغبار) و مایعات (مانند آب) ارائه میکند. رتبهبندی IP برای اطمینان از عملکرد ایمن و مؤثر تجهیزات الکتریکی، از جمله موتورها، در شرایط محیطی مختلف بدون آسیبدیدگی یا ایجاد خطرات ایمنی، بسیار مهم است.
شامل یک سیستم طبقهبندی استاندارد است که سطح حفاظت یک محفظه را در برابر نفوذ اجسام جامد (مانند گردوغبار) و مایعات (مانند آب) ارائه میکند. رتبهبندی IP برای اطمینان از عملکرد ایمن و مؤثر تجهیزات الکتریکی، از جمله موتورها، در شرایط محیطی مختلف بدون آسیبدیدگی یا ایجاد خطرات ایمنی، بسیار مهم است.
کلاس عایق (Insulation Class)
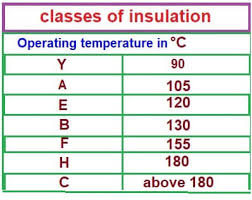
شامل طبقهبندی عایق الکتریکی مورد استفاده در موتورها و سایر تجهیزات الکتریکی که بر اساس توانایی در تحمل دما بدون کاهش کیفیت تعریف میشود. مواد عایق نقش حیاتی در محافظت از سیمپیچهای موتور در برابر گرمای بیش از حد دارند، زیرا گرمای زیاد میتواند منجر به تخریب عایق، اتصال کوتاه یا خرابی کامل موتور شود. کلاس عایق بر اساس حداکثر دمای عملیاتی که عایق میتواند در طول عمر موتور تحمل کند، تعیین میشود. این کلاسها بر اساس استانداردهایی مانند NEMA و IEC تعریف شدهاند.
چرخه وظایف (Operating Duty - Duty Cycle)
چرخه وظایف شامل دورههای کارکرد، توقف و راهاندازی است که توسط IEC و NEMA انواع این وظایف تعریف میشوند.
حفاظت در برابر انفجار (Ex-Protection)
بر اساس طبقهبندی مناطق، موتورها به انواع زیر تقسیمبندی میشوند:
· موتورهای ضد انفجار (Explosion-Proof Motors)
· موتورهای ایمنی تقویتشده (Increased Safety Motors _ Ex-e)
· موتورهای غیرجرقهزا (Non-Sparking Motors _ Ex-nA)
· موتورهای مقاوم در برابر اشتعال گردوغبار (Dust-Ignition-Proof Motors)
· موتورهای تحت فشار (Pressurized Motors _ Ex-p)
تهیه شده توسط دپارتمان تحقیق و توسعه




